|
Switch to ENG |
|
|
|
О лаборатории |
|
Приборы |
|
Цейсс-600 |
|
Публикации (последние 10 лет в ADS) |
|
В пресс-релизах САО |
|
ASPID |
Вернуться на страницу в САО  |
|
Last update: 25 Feb 2025 This page is designed by A.V. Moiseev moisav  sao.ru sao.ru
|
|
Лаборатория спектроскопии и фотометрии внегалактических объектов |
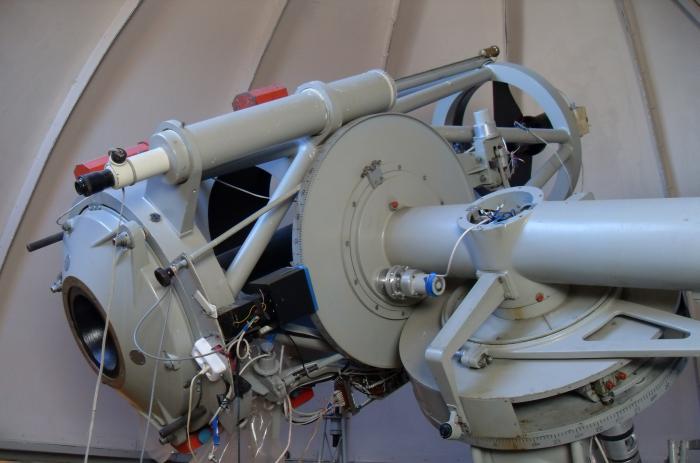
Цейсс-600 САО РАН сегодня
В.Р. АмирханянАстроному всегда необходим инструмент, позволяющий проводить массовые наблюдения объектов. Использовать для таких работ крупный телескоп нерационально. С такими задачами вполне может справиться очень хороший и заслуженный телескоп Цейсс-600, обладателем которого является САО РАН. Сегодня его единственный недостаток – ручное управление. В 1998 г. этот недостаток был частично устранен – на оси телескопа были установлены двигатели коррекции. Чтобы устранить его полностью были проделаны следующие работы:
- Установлены электродвигатели “быстрых” и корректирующих приводов на оси прямого восхождения и склонения.
- Установлены датчики положения часового угла и фокуса. В качестве датчика склонения используется изображение лимба склонения (ПЗС), с дальнейшим программным распознаванием образа.
- Для обеспечения двигателя забрала электроэнергией смонтирована станция подключения купола к силовой сети. Контакт происходит при развороте купола в азимут 36 градусов.
- Установлен датчик положения купола. Эту функцию выполняет цифровой компас LSM303DLH, смонтированный на куполе. Его показания передаются по радиоканалу в схему управления куполом. По этому же каналу проходит информация с концевых выключателей забрала и датчика температуры.
- На боковой подсмотр телескопа установлена ПЗС-камера VNI-748 с укорачивающей оптикой и V-фильтром. Масштаб 4''/пиксель.
- Для юстировочных работ в фокусе Кассегрена установлена ПЗС-камера VNI-743. Масштаб 0.2''/ пиксель
- На трубе телескопа установлен видеосервер D-Link 104, который опрашивает три вышеуказанные ПЗС-камеры и канализирует изображения по Ethernet-каналу в управляющую ЭВМ.
- Управляющая ЭВМ телескопа соединена оптоволоконной линией связи с сетью САО РАН.
Очевидно, что классический астроном-наблюдатель сегодня становится реликтом, так как не может удовлетворить своим же требованиям к объему и качеству наблюдений. С железной неизбежностью он должен передать эти функции наблюдательному комплексу, который максимально формализует процессы наблюдения, регистрации, первичной обработки и хранения информации. Только так можно получать единообразный массовый наблюдательный материал и оперативно его анализировать.
"Что можно сделать из машинки Зингера.."(с)

Из подручных материалов: все привода прямого восхожденияИменно из этих соображений собрана схема управления Цейсс-600, которая позволяет управлять всеми элементами комплекса и контролировать их состояние командами управляющей ЭВМ. А следовательно , управление можно передать программе, которая написана компетентным программистом в содружестве с астрономом. Такая управляющая программа должна требовать минимального участия в наблюдательном процессе оператора, который может находиться в любой точке Земного шара.
Управление телескопа собрано по распределенной схеме.
- Блок управления приводами прямого восхождения смонтирован на пилоне телескопа.
- Блок управления приводами склонения смонтирован на трубе телескопа.
- Блок управления приводом фокуса смонтирован около спайдеров.
- Блок управления приводами купола смонтирован за фальш-панелью подкупольного пространства.
- Блок управления приводами поворотного стола и крышек зеркала смонтирован на трубе телескопа.
- Блок датчиков купола смонтирован на куполе.
- Пульт ручного управления телескопом.
Все блоки имеют свой “мозг” в виде микропроцессора ( МП ) ATmega8515 или ATmega8535 и соединены с COMPORTом управляющей ЭВМ проводными ( блоки 1-5) или радио (блоки 6,7) линиями связи. Предусмотрена линия связи для управления навесным оборудованием. Все блоки , кроме третьего ( фокус) имеют свои источники питания . В микропроцессоры “зашиты” программы, которые принимают команды управляющей ЭВМ , выполняют эти команды и , по запросу ЭВМ, отчитываются о состоянии своего блока и исполнительных механизмов. В программах предусмотрено отражение аварийных ситуаций, даже при потере связи с ЭВМ. Такая архитектура существенно снизила нагрузку на управляющую машину, упростила управляющую программу и повысила надежность системы, что актуально для удаленных наблюдений.

Солнечная батарея питает электронику куполаНа языке IDL написана первая версия программы управления всеми элементами телескопа, позволяющая работать кнопками и ручным пультом, вводить координаты одного или списка объектов, наводить телескоп по заданным координатам, подключать автогидирование и автомат согласования позиций трубы телескопа и забрала купола.
В октябре-ноябре 2012 года проведены удаленные наблюдения ярких звезд, получены наблюдательные ряды в диапазоне часовых углов ±2h и склонений: -10.. +76 градусов. По этим данным определено положение осей телескопа и выполнена их механическая коррекция, а также уточнена скорость часового ведения. В результате получена точность наведения по двум координатам 1 – 1.5 угл.мин , точность сопровождения не хуже < ±0.2'' за минуту времени.
В настоящее время продолжается изготовление и наладка навесной аппаратуры телескопа.

Вид на купол Цейсс-600 с телескопа Цейсс-1000