Next: Наведение на фиксированное положение
Up: Алгоритм наведения.
Previous: Общие принципы наведения.
Contents
В этом режиме в начале каждого такта управления производится дополнительный
расчет
 ,
,
 (в дальнейшем
(в дальнейшем
 ,
,
 ) объекта на момент звездного времени:
) объекта на момент звездного времени:
 |
(20) |
где
 - время упреждения равное предполагаемому времени
смены режима наведение - ведение. Оно складывается из
предполагаемого времени остановки приводов и времени разгона привода
ведения до базовой скорости объекта. Базовая скорость объекта получается
из этого же расчета. Например по азимуту:
- время упреждения равное предполагаемому времени
смены режима наведение - ведение. Оно складывается из
предполагаемого времени остановки приводов и времени разгона привода
ведения до базовой скорости объекта. Базовая скорость объекта получается
из этого же расчета. Например по азимуту:
 |
(21) |
Cкорость по Z рассчитывается аналогично (вместо реального положения объекта).
В дальнейшем именно
 и
и
 используются для расчета рассогласований.
используются для расчета рассогласований.
Относительная скорость торможения и отработки рассогласования, для слежения
за объектом, рассчитывается по формуле:
 |
(22) |
где:
-
 - ускорение торможения;
- ускорение торможения;
 - рассогласование.
- рассогласование.
По этой формуле (при
 и максимальных
скоростях
и максимальных
скоростях
 и
и
 )
торможение начинается при рассогласованиях
)
торможение начинается при рассогласованиях
 (для А),
(для А),
 (для Z)
и происходит равнозамедленно.
(для Z)
и происходит равнозамедленно.
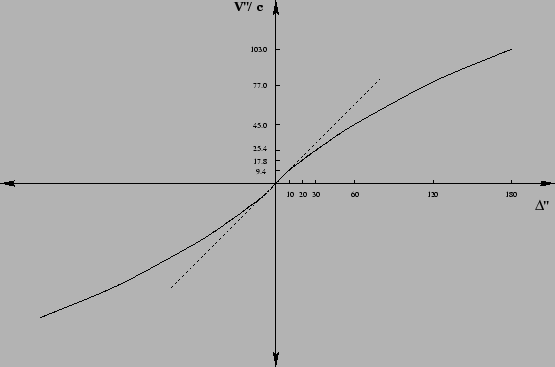
На рисунке представлена зависимость скорости V от рассогласования
 .
.
Рис.1. Зависимость скорости V от рассогласования .
При малых рассогласованиях, меньше  , формула задает линейную отработку с
коэффициентом около 1.0. Это используется для режима слежения за объектом
при помощи привода наведения.
, формула задает линейную отработку с
коэффициентом около 1.0. Это используется для режима слежения за объектом
при помощи привода наведения.
Скорость задания на привод устанавливается как
 |
(23) |
где  - поправка скорости привода ( аналог изодрома ). В
большинстве случаев она равна нулю. Ее расчет начинается после пяти секунд
нахождения в зоне
- поправка скорости привода ( аналог изодрома ). В
большинстве случаев она равна нулю. Ее расчет начинается после пяти секунд
нахождения в зоне  - приехали по формуле:
- приехали по формуле:
 |
(24) |
Это происходит на каждом шаге управления, т.е. 10 раз в секунду.
Окончательно скорости наведения, перед выдачей на SEW-привода,
для более "мягкого управления'' еще фильтруются через простейший
цифровой фильтр, эквивалентный простому апериодическому звену
 |
(25) |
где  - постоянная времени, которая меняется, но в среднем
равна 2с.
- постоянная времени, которая меняется, но в среднем
равна 2с.
Next: Наведение на фиксированное положение
Up: Алгоритм наведения.
Previous: Общие принципы наведения.
Contents
Valentina M.Maximova
2006-08-22